车载LiDAR用SPAD ToF式距离传感器
通过改进车载LiDAR的检测及识别性能,为实现安心、安全移动社会的未来做出贡献。
*) 预计2023年开始量产
概述
为了普及高级辅助驾驶系统(ADAS)、实现自动驾驶,能够对道路状况及车辆、行人等对象物体的位置及形状进行高精度检测/识别的车载LiDAR(Light Detection and Ranging:光探测和测距)的重要性日益凸显。
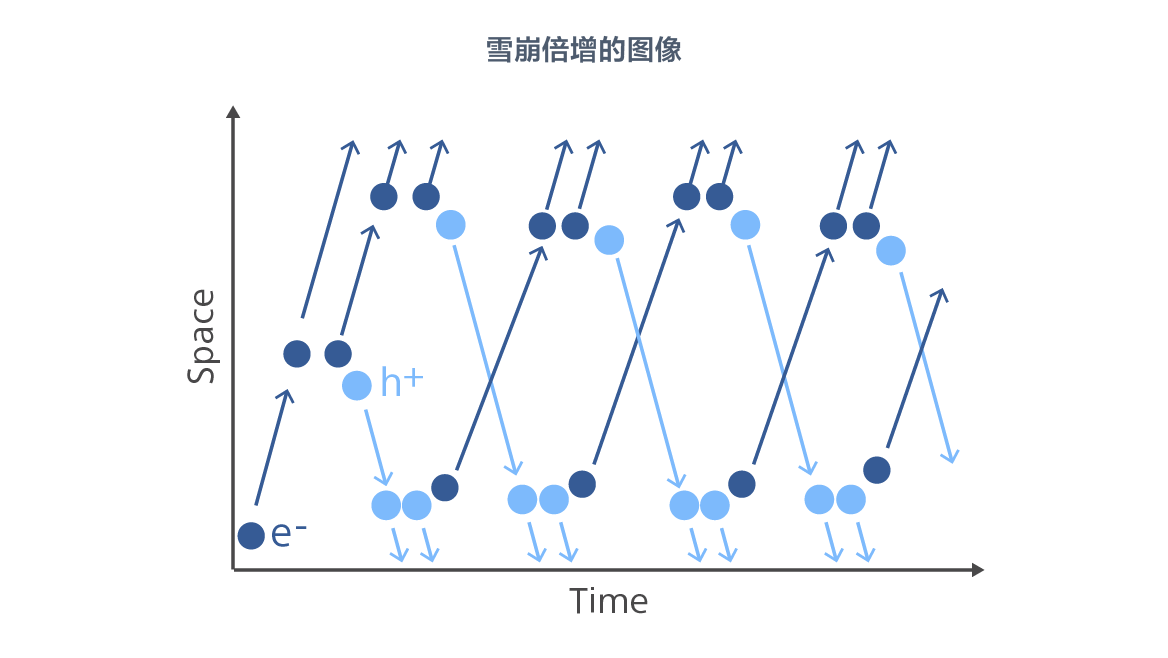
SPAD(Single Photon Avalanche Diode:单光子雪崩二极管)是一种利用了“雪崩倍增”原理的像素结构,它从入射的1个光子着手,使电子如雪崩一般增长, 因此在微弱光线下也能进行检测是其一大特长。通过将其作为SPAD dToF方式距离传感器的受光元件,可以检测到从光源发出后被对象物体反射的光到达图像传感器的光飞行时间(时间差),从而测量出与对象物体之间的距离,即可实现长距离而且高精度的距离测量。
本产品通过有效利用索尼半导体解决方案公司在CMOS图像传感器开发过程中培育而成的背照式、堆栈式、Cu-Cu(铜-铜)连接*1等技术,将SPAD像素与测距处理电路集成在1个芯片上,实现了小型化且高分辨率。凭借这款产品,能够以15cm的间隔*2、高精度而且高速地测量最大达300m的距离。另外,在各种温度环境和天气状况等车载用途所要求的苛刻条件下,也能提高检测的可靠性,而单芯片化则非常有助于降低LiDAR的成本。
*1)是指对像素芯片(上部)与逻辑芯片(下部)进行积层堆叠时,通过两个Cu(铜)片之间的连接而导通电流的技术。与通过像素区域外周的贯通电极进行上下芯片连接的TSV(硅贯通电极)相比,可提高设计自由度和生产效率,还能够实现小型化、高性能化等。
*2)是指在白天阴天的环境下,以6像素(H)×6像素(V)的加法模式,对高度1m、反射率10%的对象物体进行测量的情况。
特点
以15cm的间隔高精度测量最大300m的距离
利用Cu-Cu连接,实现了采用背照式SPAD像素结构的像素芯片(上部)与搭载测距处理电路等的逻辑芯片(下部)的各个像素的导通。这样,将受光像素以外的电路部配置在下部后就可以提高开口率*3,实现22%*4的高光子检测效率,此外,虽然芯片尺寸较小,但10μm的像素尺寸可达到约11万的有效像素数(189像素x600像素),实现了高分辨率。以15cm的间隔可高精度地测量最大300m的距离,有助于LiDAR检测、识别性能的提升。
*3) 平均每个像素的从光入射面一侧看到的开口部分(遮光部以外)与像素面积的比例。
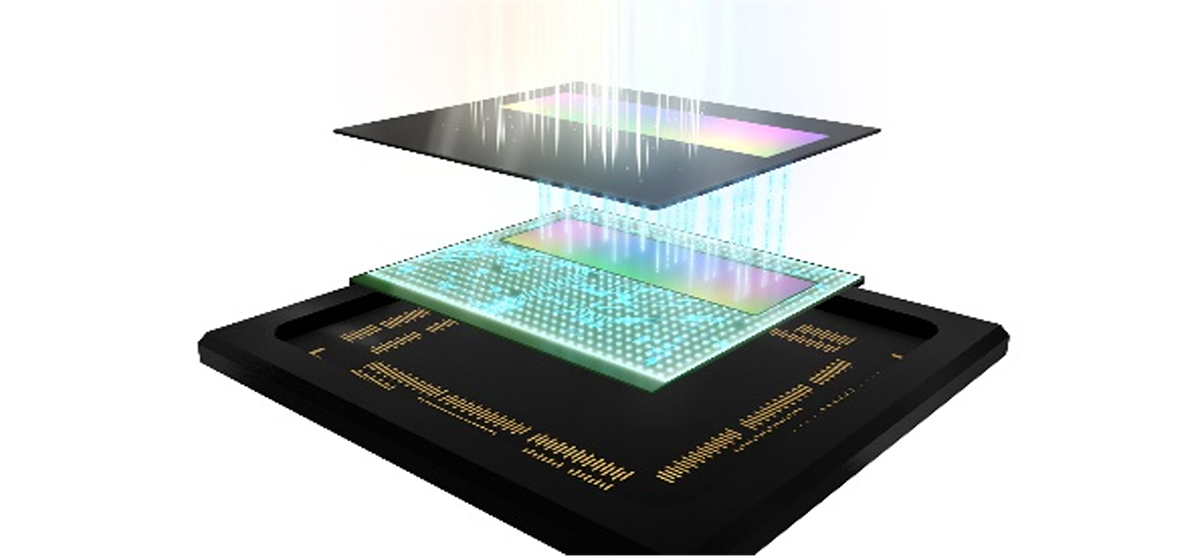
SPAD ToF式距离传感器的堆栈式结构
(顶部:SPAD像素,底部:测距处理电路)
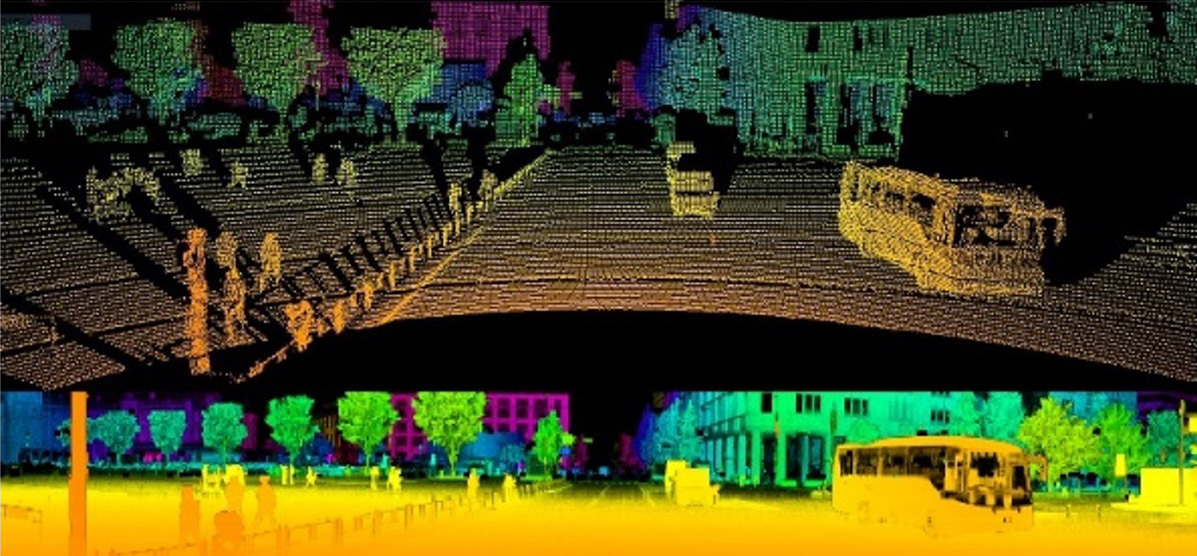
配备SPAD ToF式距离传感器的 LiDAR 成像示例
(顶部:点云,底部:距离强度图像)
遵循车载用途所要求的功能安全标准,为提高LiDAR的可靠性做出贡献
按照预定计划,将会取得汽车电子部件的可靠性测试标准“AEC-Q100”的“Grade2”认证。而且,还导入了符合汽车功能安全标准“ISO 26262”的开发流程,在故障检测、通知、控制等方面可以满足等级“ASIL-B(D)”的功能安全要求。通过这些措施,为提高LiDAR的可靠性做出贡献。
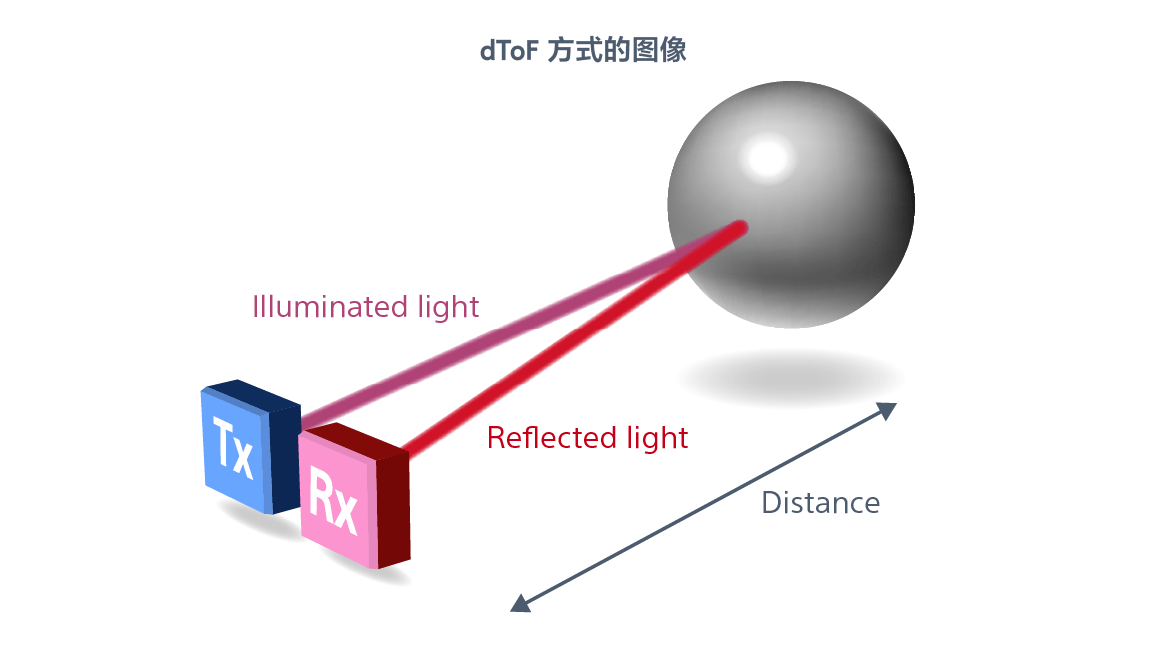
什么是direct Time of Flight方式(dToF)?
是距离测量方式之一,该方式是通过对从光源发出并被对象物体反射的光线到达图像传感器为止的飞行时间(时间差)进行检测,进而测量出与对象物体之间的距离。
在采用dToF方式的距离传感器中,使用了对单一光子进行检测的SPAD像素,可实现长距离而且高精度的距离测量。
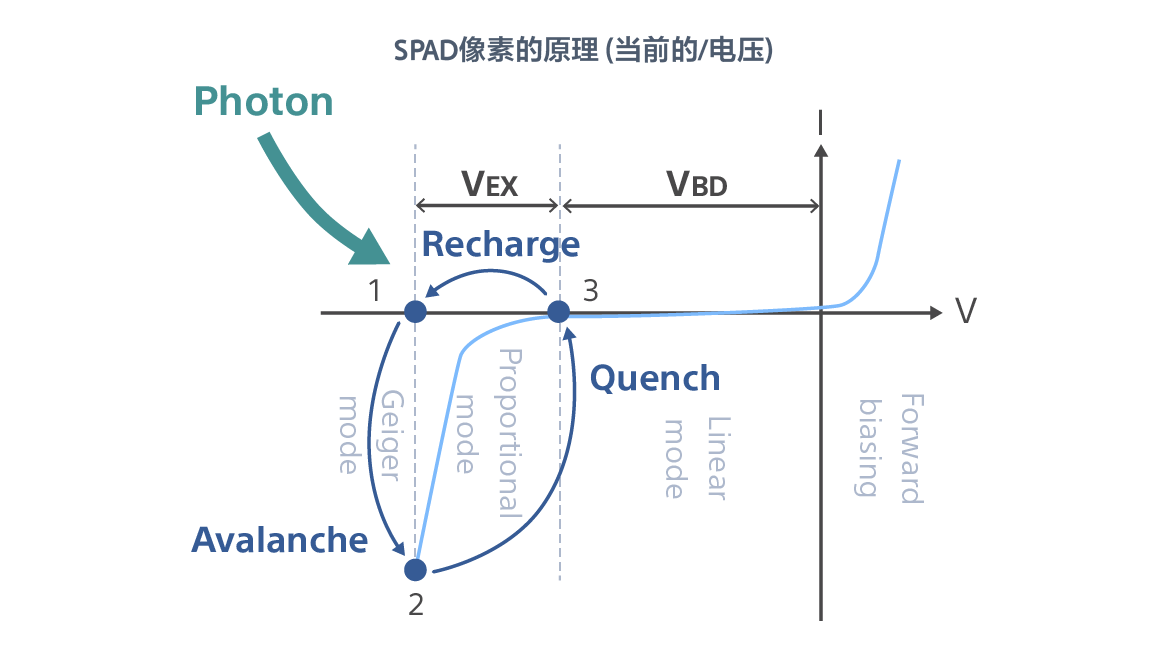
*4) 开始发生雪崩倍增的电压。
*5) 超过击穿电压(VBD)的电压。
佰思云跟原厂沟通合作中,后续会做成产品;有意向可联系